

Unmanned aerial vehicles (UAVs), also known as drones, can help humans to tackle a variety of real-world problems; for instance, assisting them during military operations and search and rescue missions, delivering packages or exploring environments that are difficult to access. Conventional UAV designs, however, can have some shortcomings that limit their use in particular settings.
For instance, some UAVs might be unable to land on uneven terrains or pass through particularly narrow gaps, while others might consume too much power or only operate for short amounts of time. This makes them difficult to apply to more complex missions that require reliably moving in changing or unfavorable landscapes.
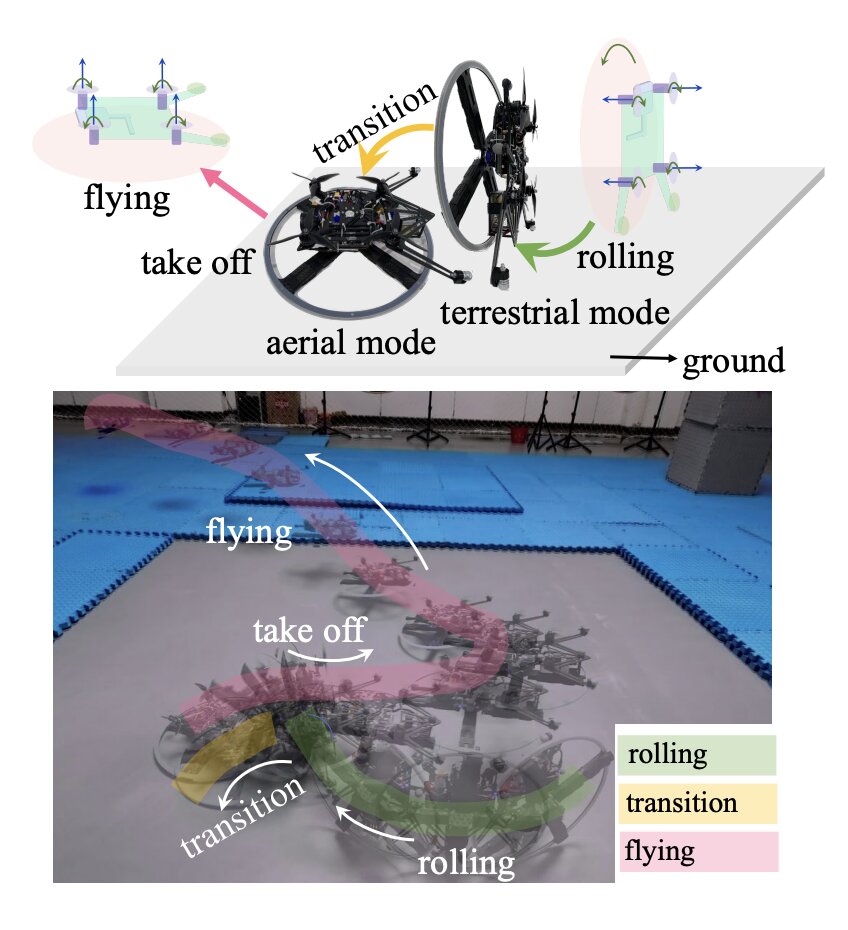
Researchers at Zhejiang University have recently developed a new unmanned, wheeled and hybrid vehicle that can both roll on the ground and fly. This unique system, introduced in a paper pre-published on arXiv, is based on a unicycle design (i.e., a cycling vehicle with a single wheel) and a rotor-assisted turning mechanism.
“Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle,” Zhi Zheng, Jin Wang and their colleagues wrote in their paper. “Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode.”
The hybrid terrestrial and aerial vehicle created by Zheng, Wang and their colleagues is a so-called quadrotor, which is an aircraft based on rotary wings that can hover above ground and fly. As it is based on a unicycle structure, it can also move on the ground on various terrains and pass through narrow gaps.
“This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows movement through special terrains, such as narrow gaps,” the researchers wrote in their paper. “It also solves the obstacle avoidance challenge faced by terrestrial robots by flying.”
In their paper, Zheng, Wang and their colleagues present their vehicle’s design along with a series of models and controllers that allow it to roll, fly, and seamlessly transition between these two modes of operation. They also outline the results of a series of experiments, where a prototype of their vehicle was tested in an environment monitored by cameras and motion capture sensors.
“We design the models and controllers for the vehicle,” Zheng, Wang and their colleagues wrote in their paper. “The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying.”
The hybrid vehicle presented in this recent paper could soon be tested and evaluated in a wider range of environments, to further validate its performance. Initial results gathered by Zheng, Wang and their colleagues suggest that the vehicle could eventually be used to tackle complex real-world missions that entail moving on tricky terrains, entering narrow passages and operating for longer periods of time.
In their next studies, the researchers plan to enhance their design further, for instance by improving the accuracy of the models they created and introducing more advanced control algorithms. This could in turn make the vehicle’s transition from its rolling to flying modes smoother, while also improving its navigation capabilities.
“We are also considering structural optimization and weight reduction, to further improve the energy consumption performance,” the researchers concluded in their paper. “Furthermore, we will use planning algorithms to enhance vehicle mobility.” https://techxplore.com/news/2023-03-hybrid-unicycle-ground-fly.html


Recent Comments