


Credits:Image: Courtesy of the researchers
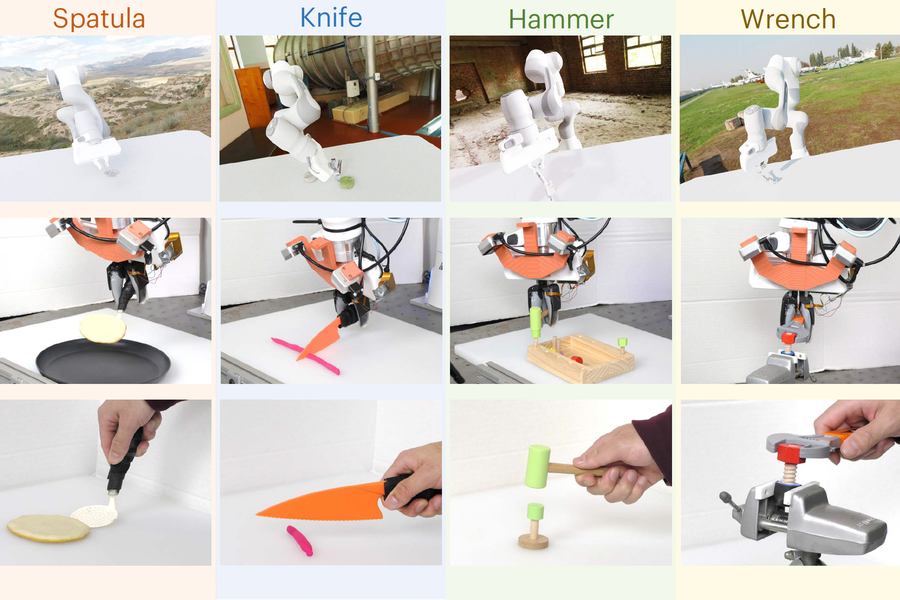
With generative AI models, researchers combined robotics data from different sources to help robots learn better. MIT researchers developed a technique to combine robotics training data across domains, modalities, and tasks using generative AI models. They create a combined strategy from several different datasets that enables a robot to learn to perform new tasks in unseen environments.
Let’s say you want to train a robot so it understands how to use tools and can then quickly learn to make repairs around your house with a hammer, wrench, and screwdriver...
Read More
Recent Comments