



Credits:Image: Courtesy of the researchers
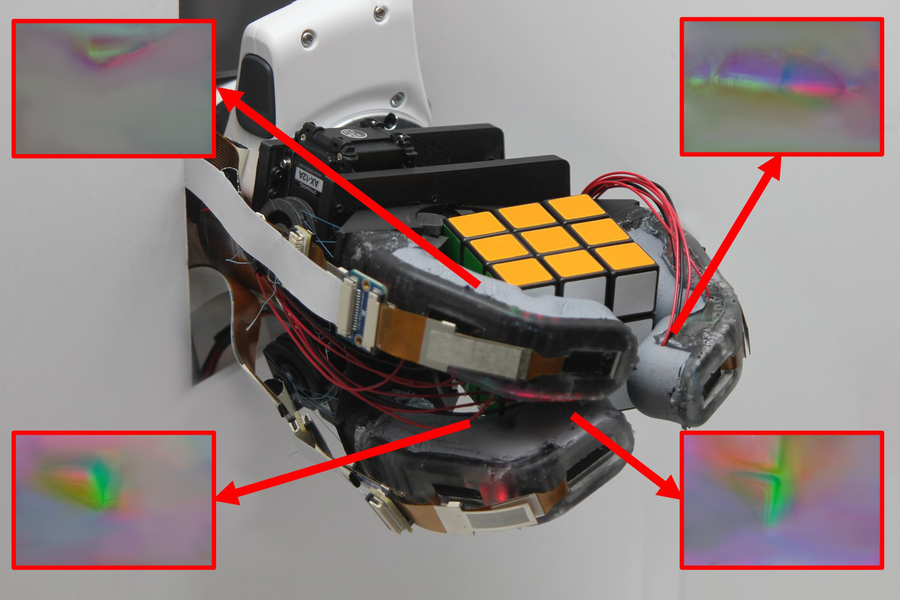
The three-fingered robotic gripper can ‘feel’ with great sensitivity along the full length of each finger — not just at the tips
Inspired by the human finger, MIT researchers have developed a robotic hand that uses high-resolution touch sensing to accurately identify an object after grasping it just one time.
Many robotic hands pack all their powerful sensors into the fingertips, so an object must be in full contact with those fingertips to be identified, which can take multiple grasps...
Read More

Recent Comments