

- Tubulin prevents toxic protein clumps in the brain, fighting back against neurodegeneration
- Robots that refuse to fail: AI evolves ‘legged metamachines’ that reassemble and withstand injury
- Space launches are changing the chemistry of Earth’s atmosphere, studies warn. Here’s what can be done
- AAOS: GLP-1 receptor agonist use increases five-year risk for osteoporosis
Tiny Soft Robot tagged posts
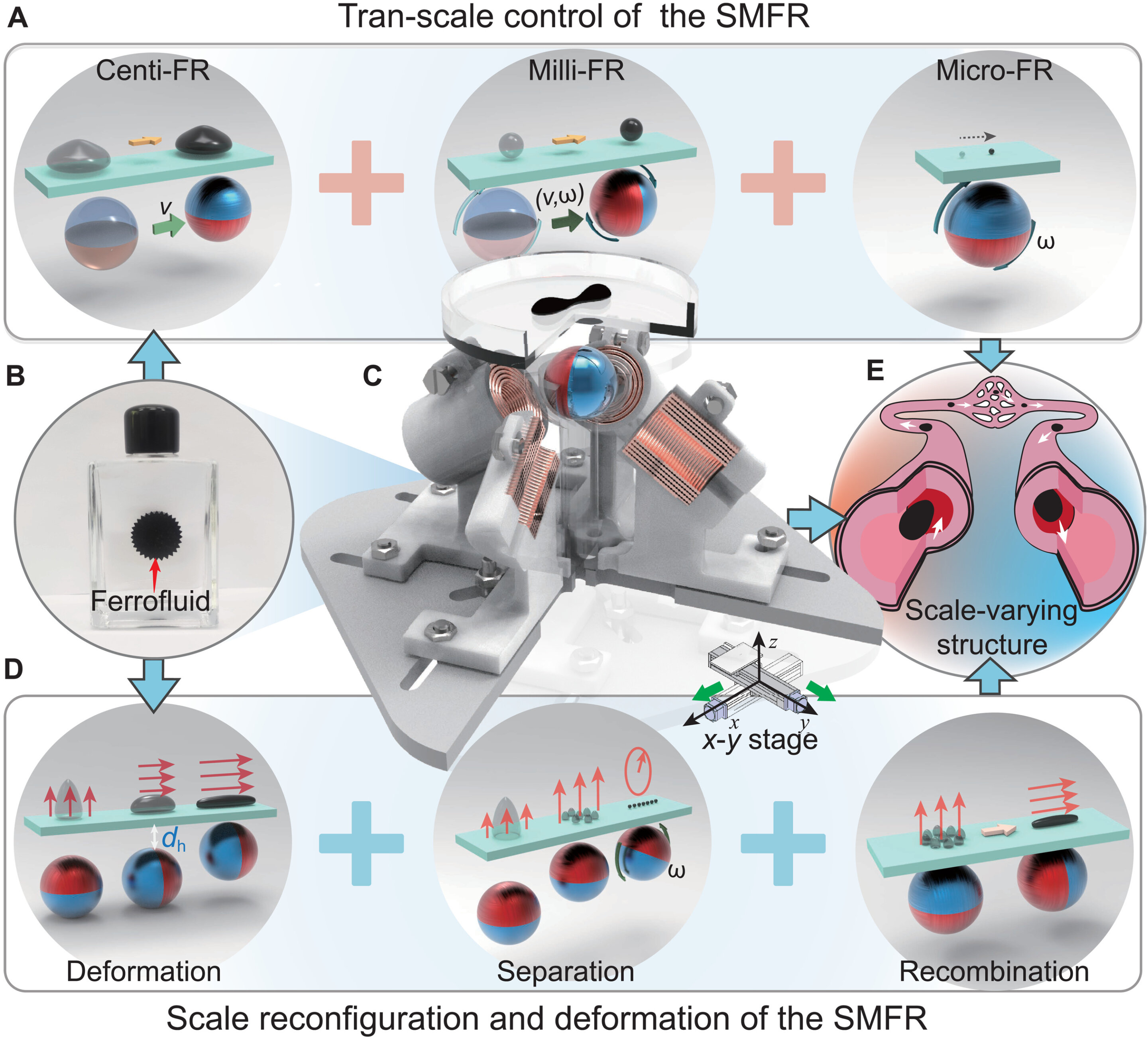
Tiny Soft Robot can Split into Tinier Bits then Reassemble after Passage Through Small Spaces
September 21, 2022,
 Physics, Technology/Electronics
Physics, Technology/Electronics

Recent Comments