

Credits:Image: MIT News, with background figure courtesy of the researchers
A new algorithm helps drones find the fastest route around obstacles without crashing. The system could enable fast, nimble drones for time-critical operations such as search and rescue.
If you follow autonomous drone racing, you likely remember the crashes as much as the wins. In drone racing, teams compete to see which vehicle is better trained to fly fastest through an obstacle course. But the faster drones fly, the more unstable they become, and at high speeds their aerodynamics can be too complicated to predict. Crashes, therefore, are a common and often spectacular occurrence.
But if they can be pushed to be faster and more nimble, drones could be put to use in time-critical operations beyond the race course, for instance to search for survivors in a natural disaster.
Now, aerospace engineers at MIT have devised an algorithm that helps drones find the fastest route around obstacles without crashing. The new algorithm combines simulations of a drone flying through a virtual obstacle course with data from experiments of a real drone flying through the same course in a physical space.
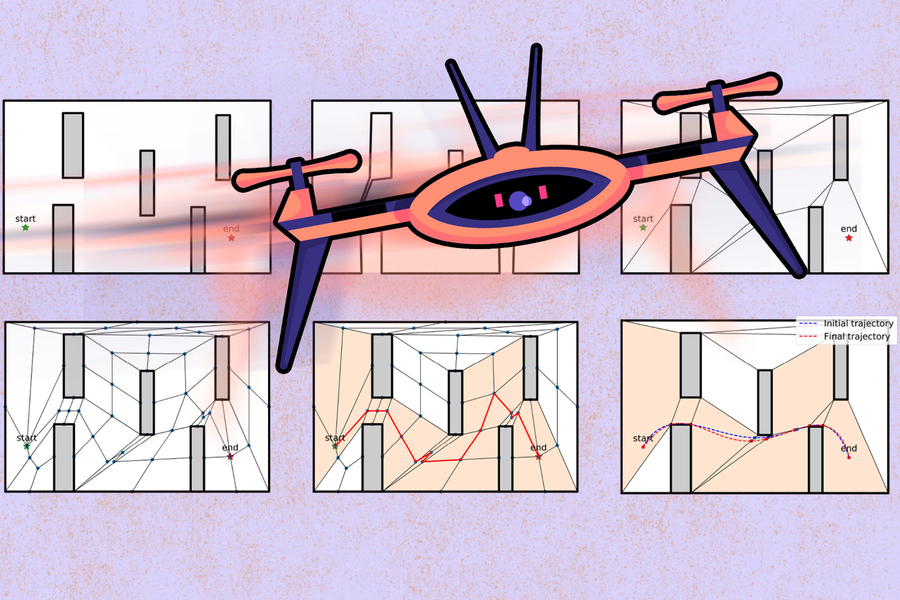
To demonstrate their new approach, the researchers simulated a drone flying through a simple course with five large, square-shaped obstacles arranged in a staggered configuration. They set up this same configuration in a physical training space, and programmed a drone to fly through the course at speeds and trajectories that they previously picked out from their simulations. They also ran the same course with a drone trained on a more conventional algorithm that does not incorporate experiments into its planning.
Overall, the drone trained on the new algorithm “won” every race, completing the course in a shorter time than the conventionally trained drone. In some scenarios, the winning drone finished the course 20 percent faster than its competitor, even though it took a trajectory with a slower start, for instance taking a bit more time to bank around a turn. This kind of subtle adjustment was not taken by the conventionally trained drone, likely because its trajectories, based solely on simulations, could not entirely account for aerodynamic effects that the team’s experiments revealed in the real world.
The researche more experiments, at faster speeds, and through more complex environments, to further improve their may incorporate flight data from human pilots who race drones remotely, and whose decisions and maneuvers might help zero in on even faster yet still feasible flight plans.
“If a human pilot is slowing down or picking up speed, that could inform what our algorithm does,” Tal says. “We can also use the trajectory of the human pilot as a starting point, and improve from that, to see, what is something humans don’t do, that our algorithm can figure out, to fly faster. Those are some future ideas we’re thinking about.”
This research was supported in part by the Office of Naval Research. https://news.mit.edu/2021/drones-speed-route-system-0810


Recent Comments