

Recent technological advances have opened new possibilities for the development of advanced medical devices, including tiny robots that can safely move inside the human body. Some of these systems could help to simplify complex medical procedures, including delicate surgeries and the targeted delivery of drugs to specific sites.
THE MINIMAX lab at University of Texas (UT) Austin specializes in the development of tiny robots for medical, environmental, and other applications. In a recent preprint paper on arXiv, researchers from this lab introduced a new 3Dprintable and magnetically steerable capsule robot that could potentially help to diagnose and treat some gastrointestinal (GI) conditions.
“My motivation for GI health monitoring is deeply personal,” Fangzhou Xia, director of the MINIMAX lab at UT Austin and senior author of the paper, told Medical Xpress. “In 2022, when I was a postdoc at MIT, I experienced a severe GI medical episode involving repeated gallstone-induced bile duct blockage that ultimately required gallbladder removal surgery.
“The complications were exacerbated by concurrent COVID infection, leading to multiple emergency room visits and repeated Endoscopic Retrograde Cholangiopancreatography (ERCP) procedures. Undergoing multiple ERCPs made me acutely aware of how invasive endoscopic procedures can be, including significant throat irritation, discomfort, and procedural burden, despite being performed for diagnostic and therapeutic necessity.”
The difficulties experienced by Xia following the surgical removal of his gallbladder ultimately inspired him to develop new capsule robots for medical applications that can be swallowed by patients and steered using magnetic fields. Such robots could reduce the current reliance on endoscopic procedures, allowing physicians to access regions of interest in the GI tract reliably and less invasively for patients.
“Following this event, I initiated a collaboration with Prof. Giovanni Traverso at MIT, a leader in ingestible robotics, and began developing a body-area-network vision for ingestible and implantable sensing systems,” explained Xia. “In this work, we focused on the magnetic navigation of a capsule robot in the GI tract, particularly in the stomach area.”
A pill-sized robot that is magnetically steered
The main goal of the recent work by Xia and his colleagues was to assess the different actuation modalities of the capsule robot he started developing at MIT, which should allow the robots to complete different tasks inside the human body. In their arXiv preprint, they explored the use of external permanent magnets and on-capsule anisotropic soft magnetic materials coated on the wall of the capsule, which would enable the roll and yaw angle control of the capsule robot motion.
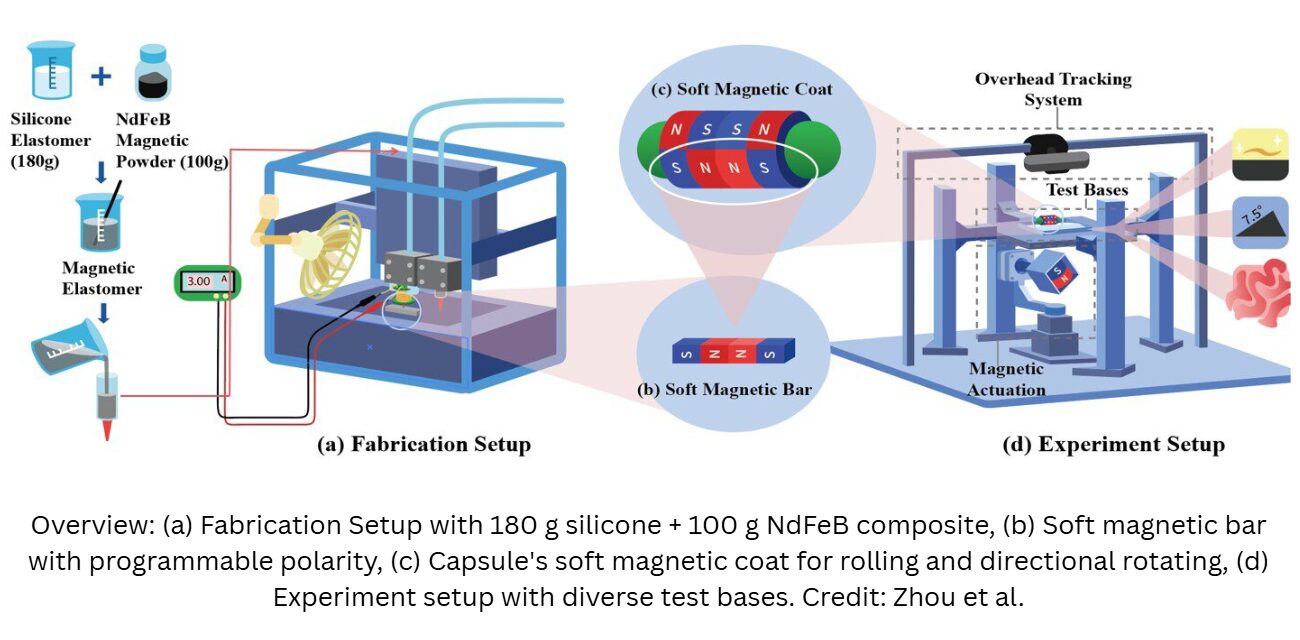
“For roll and yaw control with external permanent magnets, we focused on using a magnetic shell around capsule so that the internal components have more continuous space,” explained Xia. “To ensure stable motion with good external magnet and internal alignment, we are inspired by the Halbach array for the magnetic component arrangement, which concentrates magnetic field on one side for magnetically levitated stages.”
Instead of introducing a bulky permanent magnet inside the capsule, the researchers coated their robot’s outer shell with a soft magnetic material, effectively turning it into a programmable magnet. Specifically, they mixed magnetic NdFeB particles into soft silicone, then 3D-printed the capsule shell while actively controlling the magnetization direction during deposition.
“This created an optimized NSSN/SNNS magnetic field distribution pattern,” said Xia.
“The patterned anisotropy generates a strong, well-defined net magnetic moment that naturally aligns with a rotating external magnetic field, producing stable rolling and steering motion. As the magnetic field distribution is carefully engineered to create directional torque and predictable alignment, the capsule can roll bidirectionally, turn smoothly, and maintain stability on inclines or textured surfaces without requiring complex feedback control algorithms.”
By eliminating the need for bulky internal magnets, the team’s design preserves the entire volume inside the capsule. This makes space for other components that could be leveraged for the completion of medical tasks, including cameras, sensors, pharmaceutical drugs, or other therapeutic substances.
Around the same time, the researchers published another paper on arXiv in which they explored a different magnetic actuation mechanism for steering their robot. Specifically, they investigated the possibility of using a set of external coils and an in-capsule permanent magnets to control the capsule robot’s pitch angle.
A highlight of this related work is the dynamic system modeling and sensor fusion of on-board inertia measurement units that measure angular velocity and linear acceleration with external camera images that mimic X-ray imaging using the extended Kalman Filter. This method leads to the reduction of required frame rates by one order of magnitude, effectively reducing radiation exposure of the patient during the navigation process. This effort will later be integrated with the soft coating idea.
“The primary objective of our recent efforts was to investigate the angular roll/pitch/yaw control for rotation-based locomotion,” said Xia.
“We are now actively investigating the translation of magnets to control physical contact interaction with the GI tract internal wall. The main difference is that rotation arises from magnetic field direction alignment to generate torque, while translation requires a strong magnetic field gradient to generate force. Separating these two for different purposes makes the modality more useful for medical applications.”
Advantages and simulation results
The robot designed by Xia and his colleagues has several notable advantages over other ingestible systems introduced in the past. Most notably, the robot capsule’s motion is highly stable, and its rolling motions arise from an optimized magnetization pattern in its soft magnetic shell. The motions produced are thus more precise than those that would emerge in a “generic” magnet (e.g. a hollow magnetic cylinder), whose alignment and direction under an external field would be harder to predict.
“Using ANSYS Maxwell 3D magnetostatic simulations, we showed that the selected pole distributions create strong magnetic anisotropy and a clear resultant moment (the capsule’s net polarity is strongly biased along the intended axis), so the capsule naturally phase-locks to the rotating field and rolls smoothly with minimal wobble or unintended coupling,” said Xia.
“In contrast, a simple hollow cylinder magnet (or uniformly magnetized shell) tends to produce a more symmetric field/moment response that is easier to destabilize by offsets, local field gradients, or contact disturbances—often requiring more careful actuation alignment or additional control to prevent slip, yaw drift, or irregular rolling.”
The team’s unique design could guide the advancement of magnetic capsule robots. In the future, it could be adapted or improved by other researchers to further boost the performance and versatility of pill-like miniature robots, while broadening their functionalities.
“By programming the magnetization pattern (NSSN/SNNS) during printing and validating it through magnetostatic simulation, we achieve strong magnetic anisotropy and a well-defined net moment, enabling stable bidirectional rolling and precise steering under rotating external magnetic fields without complex control algorithms,” said Xia. “We also systematically validated locomotion on smooth, inclined, dry, and wet textured surfaces, demonstrating robustness under conditions that approximate gastric environments.”
Medical applications and next research steps
The tiny capsule robot developed by Xia and his colleagues is easy to ingest and could thus be used to perform diagnostic and therapeutic procedures within the GI tract. Before it can be deployed in clinical settings, however, the researchers will need to ascertain that it is bio-compatible and can be safely introduced inside the body.
To perform desired tasks, the robot capsule could be filled with various electronic components, drug reservoirs, or medical tools. For instance, it could be filled with cameras, biopsy tools, anti-inflammatory drugs, chemotherapy drugs, or miniature sensors.
“Potential uses for our robot include active capsule endoscopy with controlled navigation, targeted drug release at specific lesion sites, localized biopsy sampling, and in the future, sensor-enabled monitoring of physiological signals,” said Xia. “Because the actuation is wireless and relies on externally generated magnetic fields at clinically acceptable strengths, the platform offers a scalable path toward controllable, payload-capable capsule robotics for in-body medical procedures.”
The researchers are currently planning further studies aimed at further improving the robot’s navigation and broadening its functionalities. Firstly, they will try to further improve the robot’s magnetic navigation capabilities, for instance by increasing the strength of external magnetic fields to extend the distances it can cross.
“Capsule robot development for gastrointestinal health monitoring is a system engineering effort with various underlying components,” said Xia. “The key subareas involve magnetic navigation/locomotion, transducer instrumentation, electronics miniaturization, wireless charging, and testing in medical phantom/animal models.”
A long-term goal for the researchers will be to improve the robot in all these different dimensions. Eventually, they hope to demonstrate its potential for the monitoring of GI health or to reduce the invasiveness of surgical procedures, for example, enabling its use for completing endoscopic operations without anesthesia.
“Since Dr. Richard Feynman’s famous talk on nanotechnology over 60 years ago, we now stand at a pivotal moment to realize science-fiction-type ideas in the talk, such as ‘swallowing the surgeon’ for medical treatment inside the body,” added Xia.
“As we witness the impact of miniaturization technology on human civilization, it is the right time to holistically develop more advanced tools and miniaturized devices with nanotechnology.” https://medicalxpress.com/news/2026-02-3d-swallowable-robot-gastrointestinal-procedures.html


Recent Comments